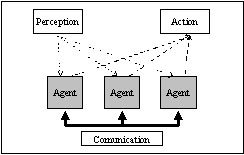
 A sketch of the
Autonomos Agents Society.
A sketch of the
Autonomos Agents Society.
 One of the manipulator arms at the Cell.
One of the manipulator arms at the Cell.
- Assembler agent: to accomplish an assembly, picking up pieces on the workspace with the
manipulator and putting them in a desired location.
- Cleaner agent: to clean the workspace, which is a previously defined area, where the
assembly is made. In this manner, unwanted objects that people or another manipulator may have put on this
area must be taken away by this agent.
- Collision Avoider agent: to avoid collisions of the manipulator with objects (other
manipulators, a hand) that move in the workspace, aiming the preservation of the system’s physical integrity.
 One of the cameras at the Flexible
Assembly Cell.
One of the cameras at the Flexible
Assembly Cell.
Computer Vision Images: The first is the image of the workspace captured with a SunVideo Board; the second is its blob colouring segmentation; the last one present each recognized object in the image in a different color. The input image is simple because was the first test done with the system.
Publications related to this work:
- BIANCHI, R. A. C.; RILLO, A. H. R. C. A distributed control architecture for a
purposive computer vision system. In: IEEE
SYMPOSIUM ON IMAGE, SPEECH AND NATURAL LANGUAGE SYSTEMS (ISNL) - IEEE INTERNATIONAL JOINT SYMPOSIA ON
INTELLIGENCE AND SYSTEMS, 2nd, Rockville, Maryland, 1996. Proceedings. Los Alamitos, CA, IEEE
Computer Society Press, 1996. P. 288-294.
- BIANCHI, R. A. C.; RILLO, A. H. R. C. A
Purposive Computer Vision System: a Multi-Agent Approach. In: WORKSHOP ON
CYBERNETIC VISION, 2nd, São Carlos, 1996. Proceedings. Los Alamitos, CA, IEEE Computer Society
Press, 1997 (in print).
- BIANCHI, R. A. C.; RILLO, A. H. R. C. Uma
Arquitetura de Controle para Sistemas Complexos de Visão Computacional. In: SIMPÓSIO BRASILEIRO DE
AUTOMAÇÃO INTELIGENTE, 3, Vitória, 1997. Anais. Vitória, Sociedade Brasileira de Automática, 1997. P.
94-99.
- BIANCHI, R. A. C.; RILLO, A. H. R. C. Uma
Arquitetura de Controle Distribuída para um Sistema de Visão Computacional Propositada. In: ENCONTRO NACIONAL DE INTELIGÊNCIA ARTIFICIAL, 1,
Brasília, 1997. Anais. Brasília, Sociedade Brasileira de Computação, 1997 (in print).
Last updated November 1st., 1998.

Reinaldo Augusto da Costa Bianchi
Work address:
Laboratório de Sistemas Integráveis
Av. Prof. Luciano Gualberto Trav.3 N.158
Cidade Universitária
CEP: 05508-900 - São Paulo - SP
Brazil
Phone: x55-11-818-5530
E-Mail: